
Jessica Lam

Email: jeslam@mit.edu
Phone: (626) 417-4463
About me
I’m a first-year grad student at MIT studying Mechanical Engineering and researching at the MIT Sea Grant. My thesis is to automate the flow into fluidized bed bottle upweller systems (BUPSY) by using computer vision and flow sensor which integrates into existing operation setup.
I earned my bachelor’s degree in mechanical engineering from MIT with a concentration in controls, instrumentation, and robotics. As an undergrad, I was the mechanical design lead on Arcturus, a new autonomous marine vehicle team my friends and I started!
In my free time, I love tinkering and making personal projects, cooking and baking, and watching movies with friends.
Resume
Education
Master of Science in Mechanical Engineering
Massachusetts Institute of Technology
Sept 2024 - Jun 2026
Bachelor of Science in Mechanical Engineering
Massachusetts Institute of Technology
Sept 2024 - Sept 2026
Experience
Amazon Robotics
Hardware Intern
Jun 2025 - Aug 2025
- Designed and prototyped an ergonomic handheld boxcutting device that is 50% lighter and 25% smaller than comparable commercially available tools with similar performance
- Created prototype components using CAD and GD&T, combining in-house fabrication with quick-turn vendor parts to accelerate design iteration
- Developed test bed to measure blade mechanics, motor/battery performance, and overall system energy efficiency
- Analyzed stress and fatigue life of components in a 30-ft pick-and-place robotic assembly system, validated through FEA
- Created an internal tool to estimate axle fatigue life based on various loading and boundary conditions
MIT Arcturus
Founder and Mechanical Design Team Lead
June 2021- June 2024
- Led a 20-member mechanical subteam in a 60-member autonomous marine robotics team, providing design feedback and guiding students in key mechanical engineering skills including DFM, machining processes, and CAD
- Managed design and fabrication of mechanical systems for three autonomous boats and an underwater vehicle that navigate through and interact with their environment
- Coordinated and competed in international autonomous boat competitions, including RoboBoat in Sarasota, Florida, and the Njord Challenge in Trondheim, Norway
- Organized and participated in outreach events, promoting marine robotics within the Cambridge/Boston community to inspire interest in STEM and expand team engagement
- Published paper on the development of our multipurpose autonomous surface vehicle testing platform for IEEE OCEANS 2023
Capra Robotics
Mechatronics Intern
Jun 2023 - Aug 2023
- Developed pan-tilt lifting gimbal solution that uses a hyperspectral camera to analyze the sugar and acid content of grapes through non-invasive methods over 7-week internship
- 3D-printed mechanism for pan-tilt gimbal motors to position and stabilize a hyperspectral camera with PID gimbal controller
- CAD and manufacture vertical displacement lift with a range from 12” to 52” capable of reliably lifting an 8.8-lb hyperspectral gimbal system using only 3D printed and off-the-shelf components
- Successful field testing and proof-of-concept demonstration at the vineyard at the end of the internship
Naval Nuclear Lab
Intermediate Technical Intern
Jun 2022 - Aug 2022
- Communicated with five engineers/sailors on lifecycle testing specifics to develop preventative maintenance protocols
- Designed and assembled 6-ft automated system to rotate a handwheel and pull down a lever while collecting and analyzing data on torque and position
- Collected data equivalent to one month’s worth of use on steam generator hardware in one night of testing
Publications
Deep-Sea Sediment Sampler for Hadal Depths
September 2024
Published in IEEE Oceans 2024
Twin Pickles: A Sediment Sampling Autonomous Surface Vehicle
May 2024
Published in MIT Undergraduate Research Journal
Propeller Characterization Testing of Blue Robotics T200 Thruster
June 2023
Published in IEEE Oceans 2023 and MIT Undergraduate Research Journal
Ship Happens: A Multipurpose Autonomous Surface Vehicle Testing Platform
June 2023
Published in IEEE Oceans 2023
Awards
Cooke College Scholar
2017 - present
Scholarship and leadership program for high-achieving low-income college students. Awarded to ~ 2.1% of applicants.
Carl G. Sontheimer Prize
2024
Awarded to 3 students of 420 in the MIT MechE Department for creativity and innovation in design
Anchor Qea Scholarship Recipient
2024
Awarded to eight graduate students in the field to develop solutions to environmental challenges
MIT Mechanical Engineering De Florez Award Competition
May 2024
2nd place in undergraduate design for deep-sea sediment sampler
Research
MIT Sea Grant Lab
Ergonomic Upweller Farming
Sept 2024 - Present
- Interview aquafarmers about current nursery-stage shellfish farming practices to determine pinch points and brainstorm potential solutions
Deep-sea Sediment Sampler
Sept 2023 - Sept 2024
- Developed a mechanical sediment core sampler with Inkfish for deep-sea exploration in the Mariana Trench, enabling preservation of intact soil samples at hadal depths (10,000 m)
- Innovated a fully mechanical system using low-precision interfaces to operate under extreme hadal conditions, overcoming limitations of onboard resources and power
- Tested prototype in the Charles River to validate triggering and collection mechanisms
- Published at IEEE OCEANS 2024 Halifax Conference
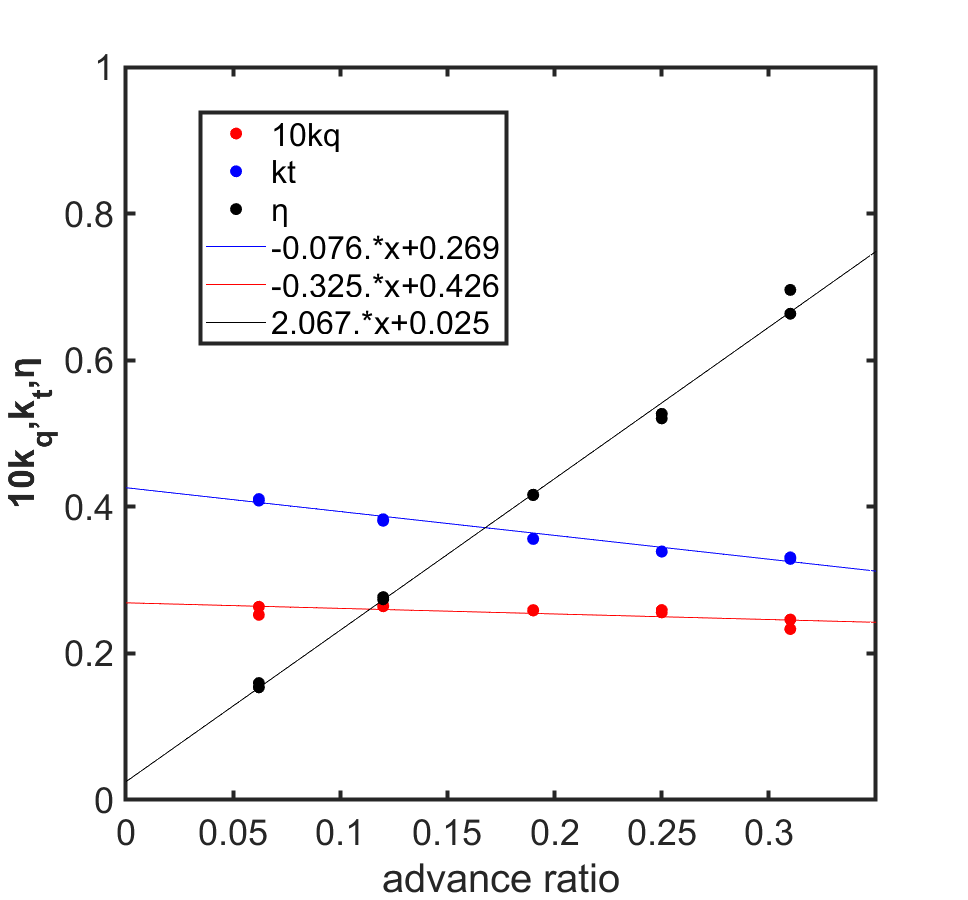
Blue Robotics Propeller Curve
Sept 2022 - June 2023
- Develop testbed protocol to gather data (motor RPM, advance speed, thrust force, efficiency) for propeller curve
- Used Arduino with Xbee radio and RTC data logger to remotely control thruster, stream data in real-time, and store data
- Published and presented data at IEEE OCEANS 2023 Limerick Conference
MIT Therapeutic Technology Design and Development Lab
Obstructive Sleep Apnea Project
Sept 2022 - June 2023
- Create 3D printed custom mouth prosthesis that utilizes a vacuum to reposition the tongue opening up the airway
Barrier Project
Jan 2021 - Sept 2021
- Prototype a condom applicator for effective application and penile stimulation during placement to increase condom use and decrease unintended pregnancies and STIs
- Fabricated testing rig to determine the integrity of different materials under friction forces
Class Projects
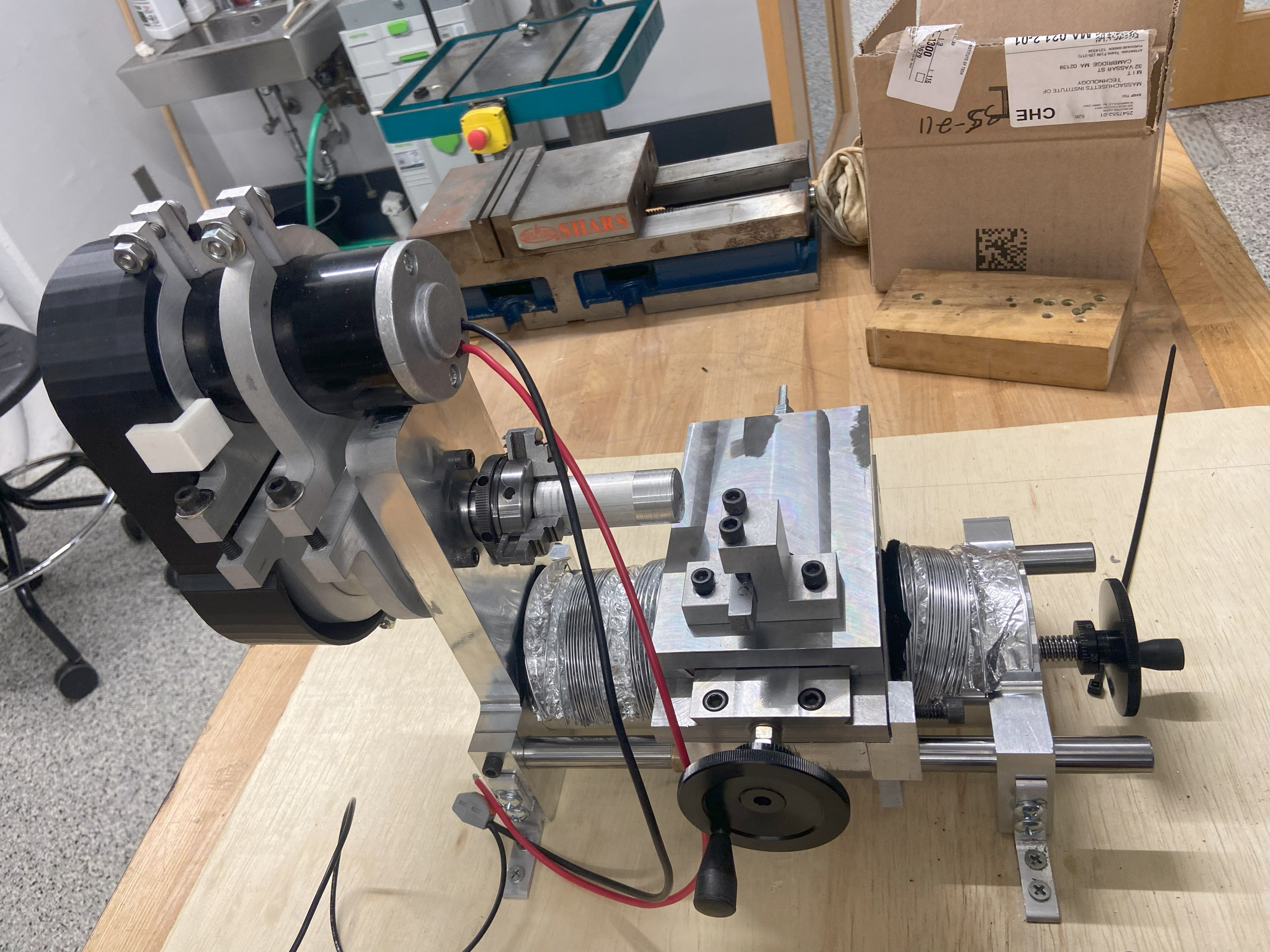
Desktop Lathe
Feb 2025 - Jun 2025
- Modeled, designed, and fabricated a CNC desktop lathe capable of cutting steel with precision up to 50 microns
- Performed tolerance stack and error allotment to guide subsystem accuracy requirement to meet system accuracy goals
- Developed parametric calculator relating design parameters to lathe performance, informing early design tradeoffs
- Validated model predictions with CAD and FEA, followed by subsystem testing (stiffness, runout, thermals, torque-to-turn) to ensure smoother final integration
Feedback
Sept 2023 - Dec 2023
- Utilized temperature, dissolved oxygen, and weight sensors to optimize fish feeding resulting in streamlined operations, improved fish health, reduced food waste, and lower labor cost
- Created electronics wiring schematics to integrate signal input and output to fish distribution hardware
"Twin Pickles" - Autonomous Sediment Sampling Boat
Feb 2023 - May 2023
- Designed a catamaran boat to maneuver easily and maintain position as it collects ocean floor samples crucial for studying climate history, marine ecosystems, and human impact on oceans
- Fabricated and integrated aluminum framing structure and winch assembly to deploy and collect sediment sampler
- Published Sediment Sampling Autonomous Vehicle in MIT Undergraduate Research Journal
Battery Monitor PCB
Feb 2023 - Jun 2023
- Design a simple battery management system PCB that could be implemented on an autonomous surface vehicle
- Featured on MIT Mechanical Engineering YouTube page
Hippyoyos
Sept 2022 - Dec 2022
- CAD, CAM, and CNC Mill the injection molds to create 100 hippo yoyos
- CAD and 3D print mold for thermal forming clear cover on yoyo
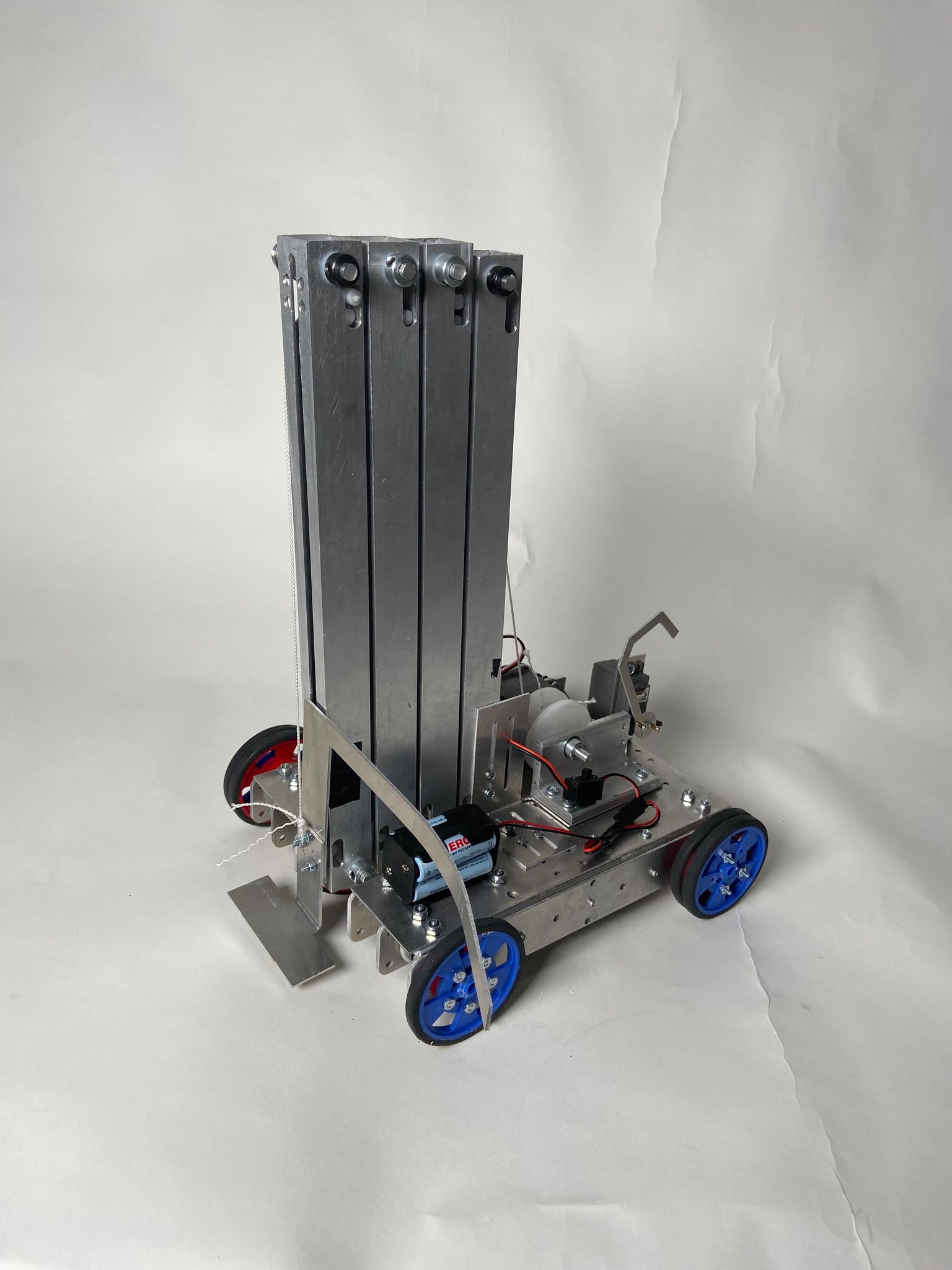
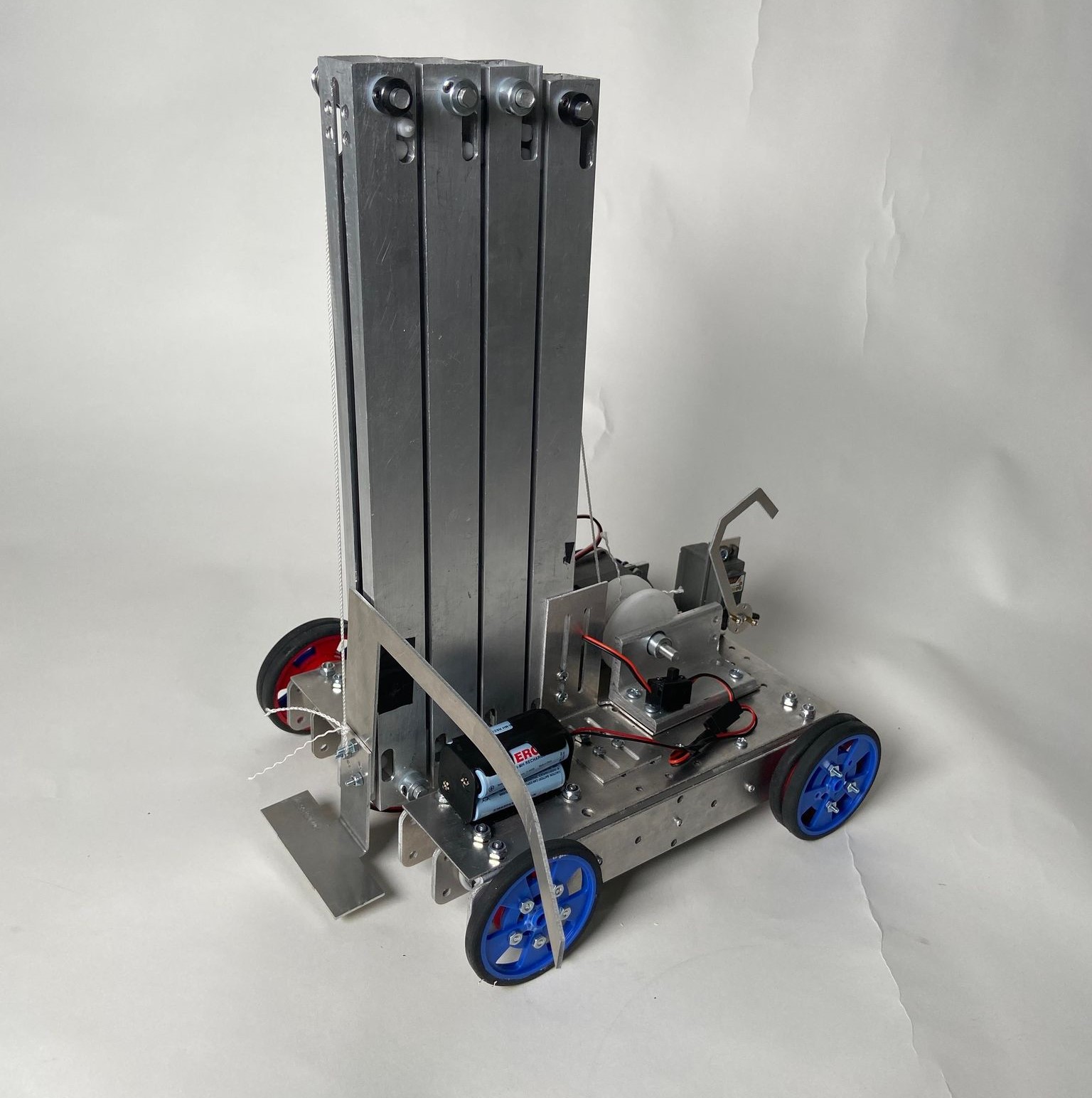
MIT Design and Manufacturing I
Feb 2022 – May 2022
- Develop and fabricate a four-wheel belted tank drive chassis to drive up a 25-degree incline
- Designed and assembled a four-state continuous linear extension mechanism to lift a 5-lb mass vertically upwards
Skills
Portfolio
See examples of my projects here!
- All
- Work experience
- Coursework and research
- Clubs
- For fun


"Amazon Robotics
I developed of an ergonomic handheld box-cutting prototype that was 50% lighter and 25% smaller than comparable commercial tools. Beyond this, I work on the stress and fatigue analysis of components in a 30-ft pick-and-place robotic assembly system. Due to NDA restrictions, additional information and visuals cannot be shared.

-min_edited.jpg)




{kind=link}
-min.jpg){kind=link}
{kind=link}

Lifecycle testing Rig
Lifecycle test assembly to collect data on wear on sailor training eqipment over time. At the end of the internship, we collected data equivalent to one month’s worth of use on steam generator hardware in one night of testing. This project was classfied so I can't discuss more details.