"Twin Pickles"


Motivations
Twin Pickles is a semi-autonomous soil sampling boat to study harmful algal blooms. Twin Pickles increases access to soil samples decreasing the research bottleneck to help scientists understand what triggers algal cysts to spontaneously germinate, causing a bloom. Predicting when and where harmful algal blooms occur is crucial for protecting human health, preserving ecosystems, safeguarding economies, and ensuring water quality.
Project information
- CategoryCourse project
- Project dateSpring 2023
- Skills usedManufacturing, vehicle design and construction
- Final presentation
- Paper
System Highlights
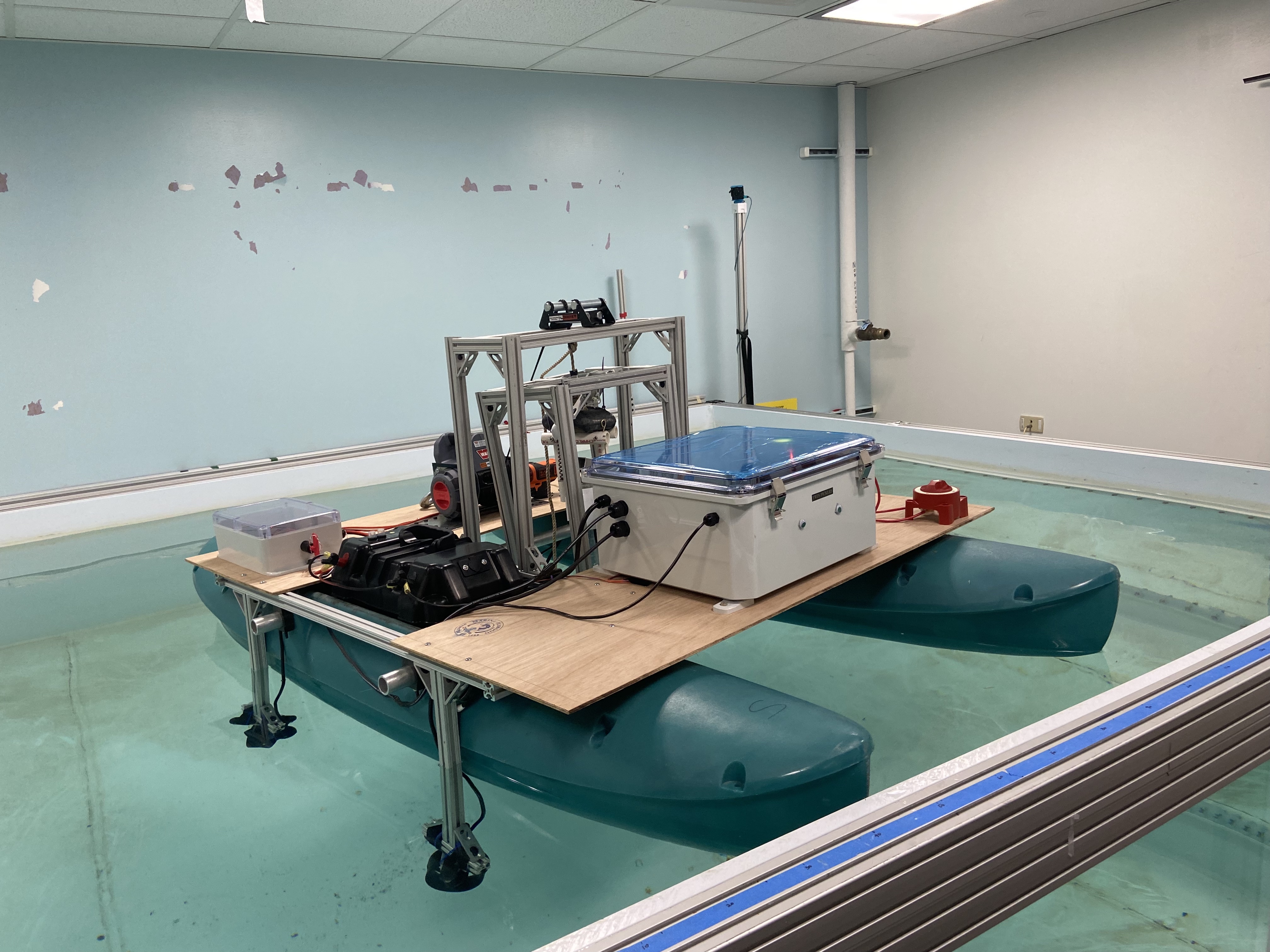
Twin Pickles (T.P.) is a catamaran boat that utilizes GPS coordinates to travel to points of interest and lowers a sampler to collect and store soil samples. T.P. uses two T500 thrusters in the back to navigate and traverse to waypoints and four T200 thrusters in an omni-x configuration for station-keeping and counteracting wave disturbance. A winch on the boat lowers and raises a spring-loaded sampling system that collects and preserves soil samples.
My contribution
The team consisted of 10 undergraduate students, divided into 5 subteams: sampler, winch system, catamaran, controls, and electronics. I led the catamaran team and designed and assembled the structure connecting the hulls, the platform to support all systems and the mounts for the thrusters. Additionally, I contributed to the electronics team, where I developed schematics to integrate sensor inputs and thruster control outputs with the Raspberry Pi.
Reflection
Working on the Twin Pickles project provided a unique opportunity to combine technical skills in engineering with practical, real-world applications in marine robotics. This project highlighted the importance of parallelization, communication, and testing. We effectively had 6 weeks to design and build the system. The boat, sampling system, electronics, and control were all developed concurrently and communication was crucial for successful integration on a tight timeline. We assembled everything a few days before the end of the semester and we only had time for one full system test in the Charles River. During that test, the sediment sampler did not successfully collect a soil sample despite working during independent lab testing. Testing of the fully integrated system would help debug the entire system. Overall, I’m immensely proud of what our team accomplished in such a short time. This project provided invaluable hands-on experience in an accelerated research environment, solidifying my passion for creating solutions that have direct, practical benefits for end users.
Catamaran
We designed a catamaran base because the two hulls provide stability, which is necessary to test in the ocean. To simplify the design for our short timeline, we used premade plastic hulls and added a custom framing of 8020 T-slots and aluminum tubing for structural support and easy mounting points. For station keeping, we have four T200 thrusters at 45-degree angles. To traverse between waypoints, we are using two T500 in a differential thrust configuration. A sheet of marine grade plywood is attached to the top of the catamaran to mount all other systems.

Winch
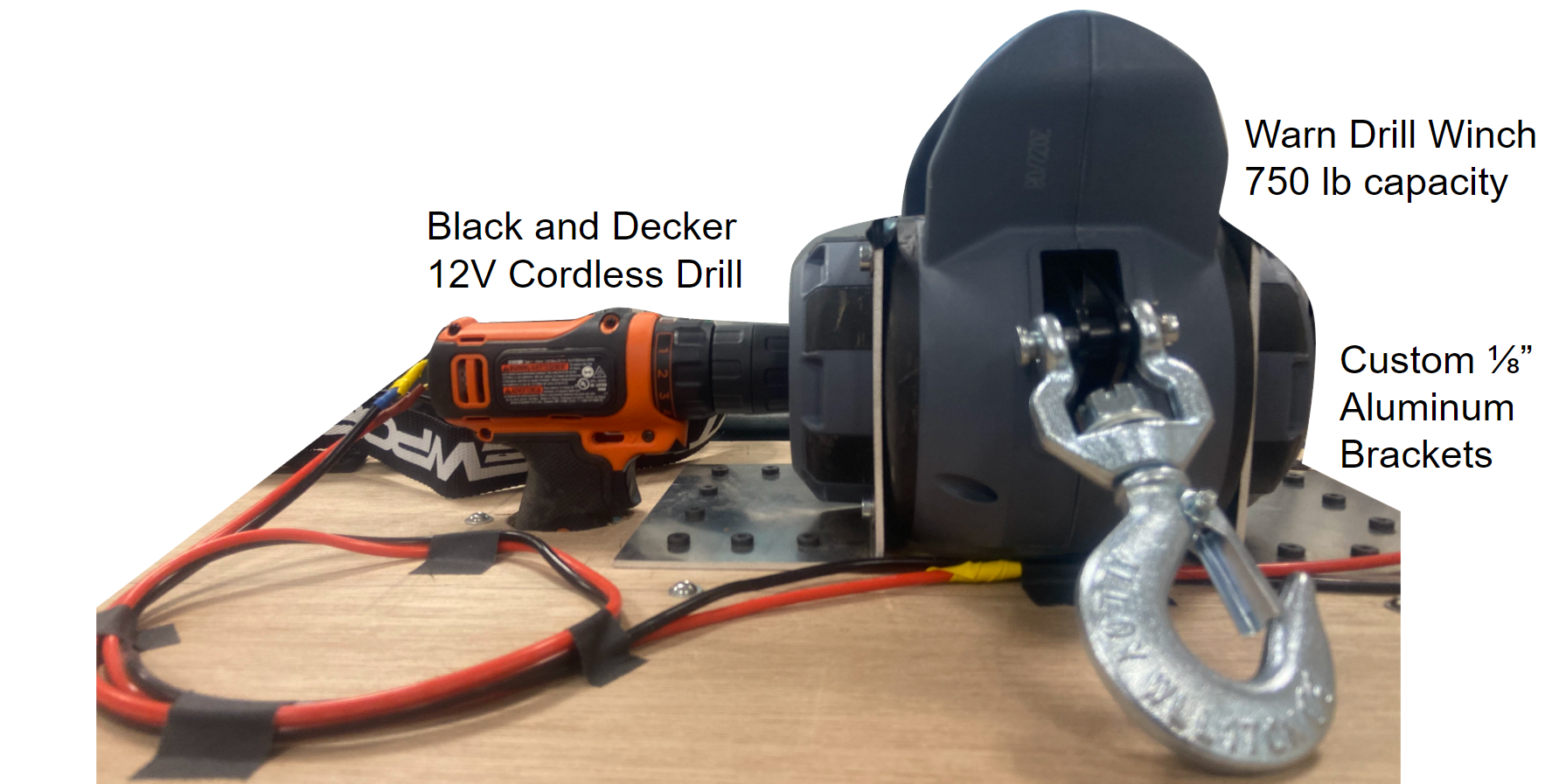
To lift and deploy the sediment sampler, we needed to create a winch and support system. To do this, we used a winch designed to move vehicles and modified a drill connected to our electrical system. The rope of the winch goes over a large pulley and moves the sampler up and down. A frame for the sampler was connected to the chassis frame and houses the sampler when it isn't deployed.
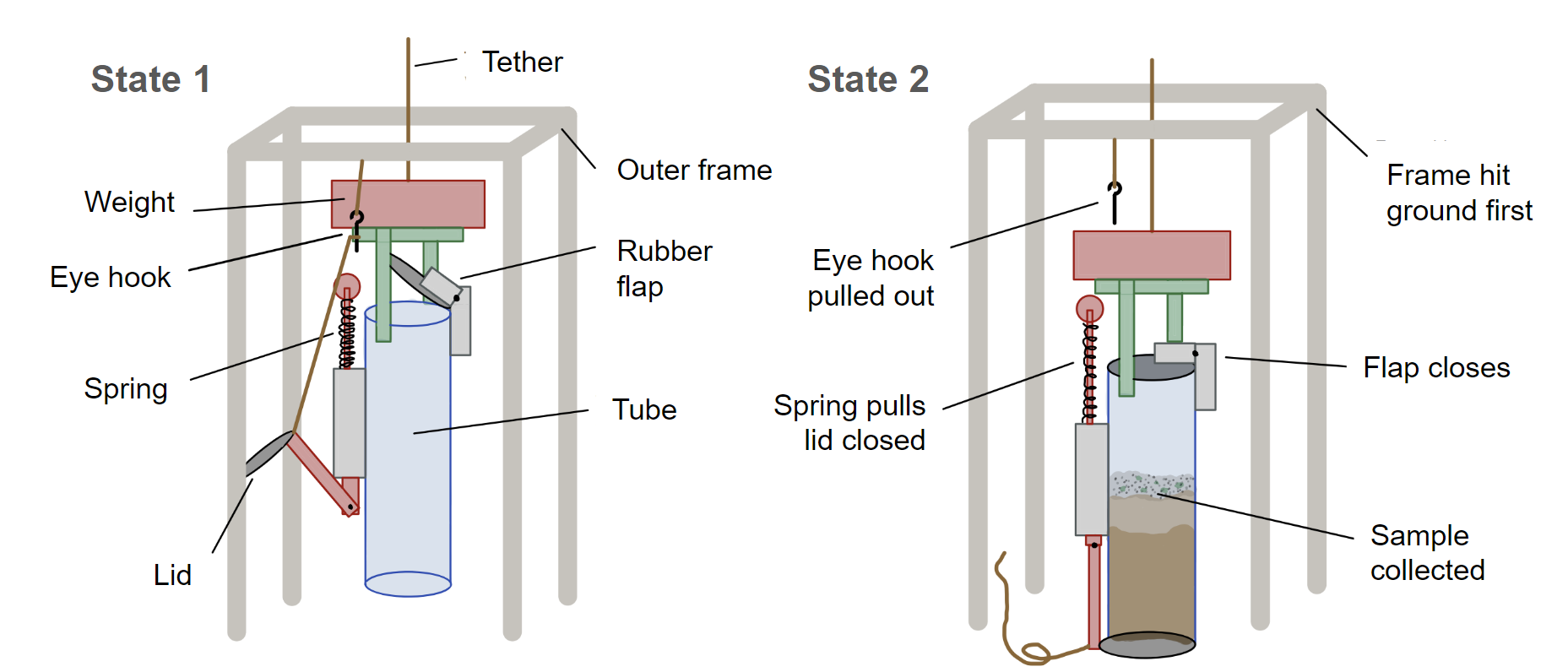
Sediment sampler
Early on in the decision process, the team decided to make the sampler a passive system because we didn't have an additional cable to provide power. After some research, we chose to make a springloaded multicore system that preserves the water mud interface. Our solution is comprised of an outer frame that moves down with the inner portion of the sampler; once the outer frame makes contact with the sea floor, it remains stationary as the inner portion continues to move down. The difference in height as the inner portion moves relative to the now stationary outer frames releases a pin that closes the sediment sampler.

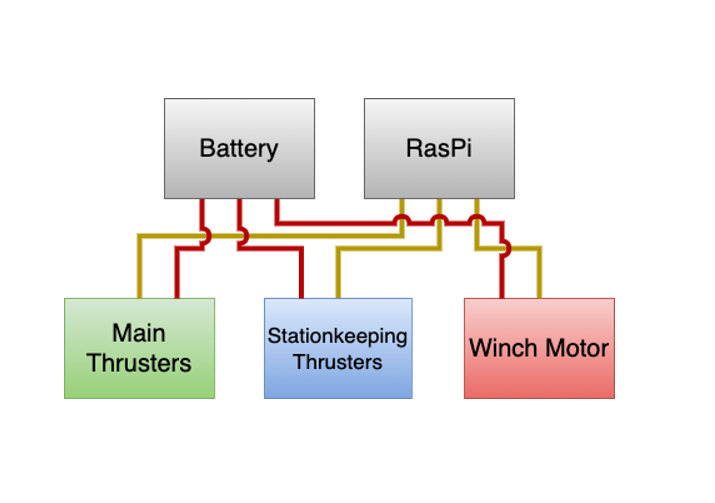
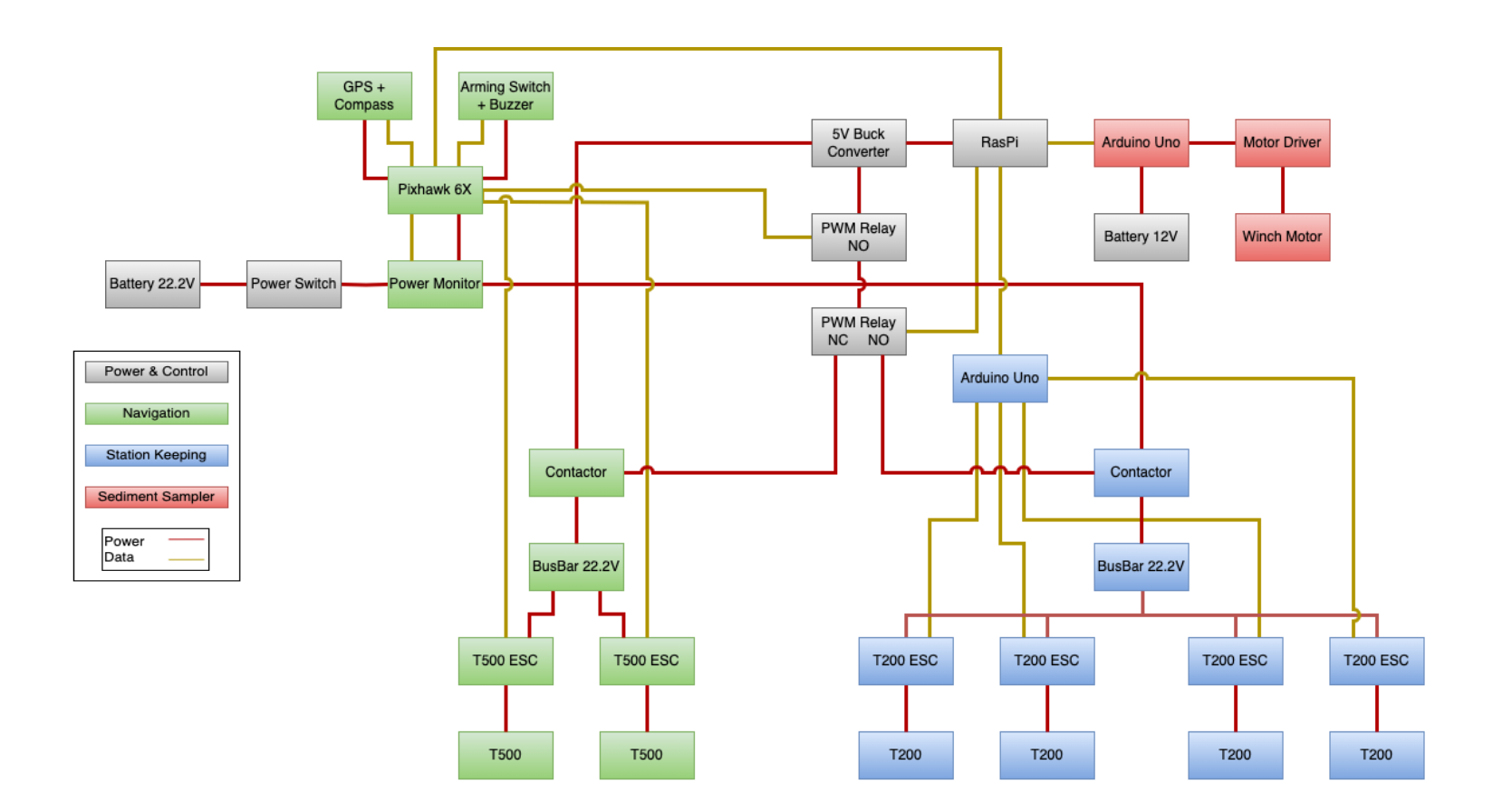
Electronics
The goal for the electronics was to provide power management and control to the rest of the system. We utilized two 12V AGM batteries to power all systems on the boat. A Raspberry Pi controlled the stationkeeping and main navigation thrusters as well as the deployment of the sediment sampler.