Blue Robotics Thruster Characterization
Motivation
Over the last few years, the T200 thrusters have become the a popular thruster amongst researchers, scientists, and businesses developing marine robotics technology. As a member of Arcturus and a researcher at the MIT Sea Grant I’ve used these thrusters on multiple project, so I was surprised to learn that despite the popularity, there was only published data for the thruster in bollard conditions (when the thruster on but not moving through the water) and no published data on the performance of the thruster in free-running conditions (when the thruster is on and moving through water). Free-running conditions is a very common use case for the thruster and I wanted to utilize the data to optimize the power efficiency of the boat so I decided to run test to collect and ultimately publish that data.
Project information
- CategoryCourse project
- Project dateSpring 2023
- Skills usedExperiment Design, Data Collection and Processing
- Paper
System Highlights
Over the last few years, the T200 thrusters have become the a popular thruster amongst researchers, scientists, and businesses developing marine robotics technology. As a member of Arcturus and a researcher at the MIT Sea Grant I’ve used these thrusters on multiple projects, so I was surprised to learn that despite the popularity, there was only published data for the thruster in bollard conditions (when the thruster on but not moving through the water) and no published data on the performance of the thruster in free-running conditions (when the thruster is on and moving through water). Free-running conditions are a widespread use case for the thruster. I wanted to utilize the data to optimize the boat's power efficiency of the boat so I decided to run tests to collect the data.
My contribution
I was the only student that worked on the project. The data from the tests run were of personal interest, but with the support of my advisor, I published and presented the data at the 2024 OCEANS Limerick conference.
Reflection
This was my first research paper and conference, and one of the few projects where I had complete autonomy. Through this experience, I learned the critical importance of setting and adhering to smaller deadlines within a timeline. I also heavily underestimated how time-intensive it can be to sift through and analyze large datasets. Matlab was an incredibly helpful tool to extrapolate important data, but even then it was a very tedious task.
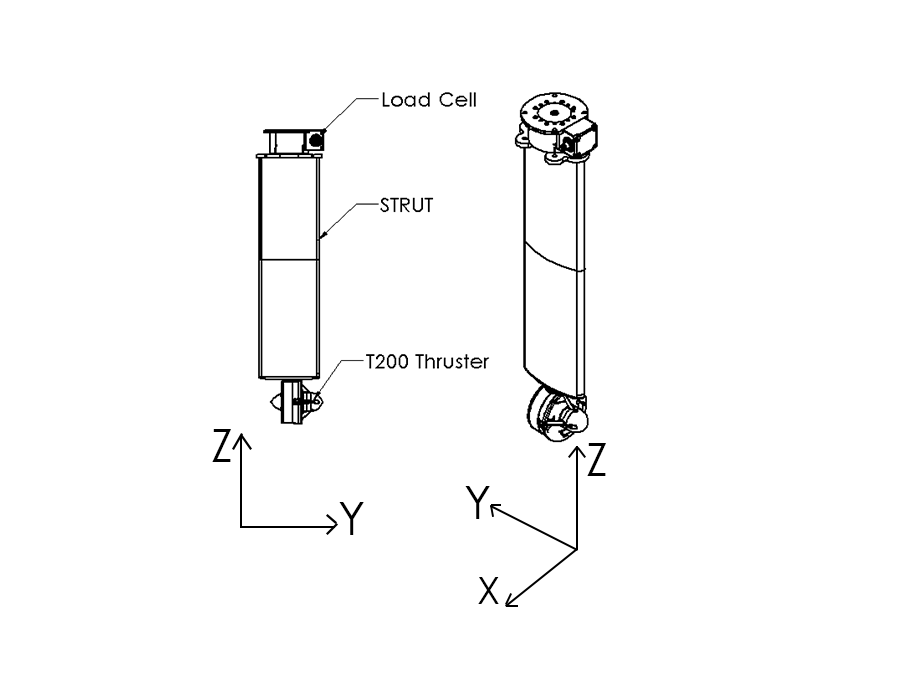
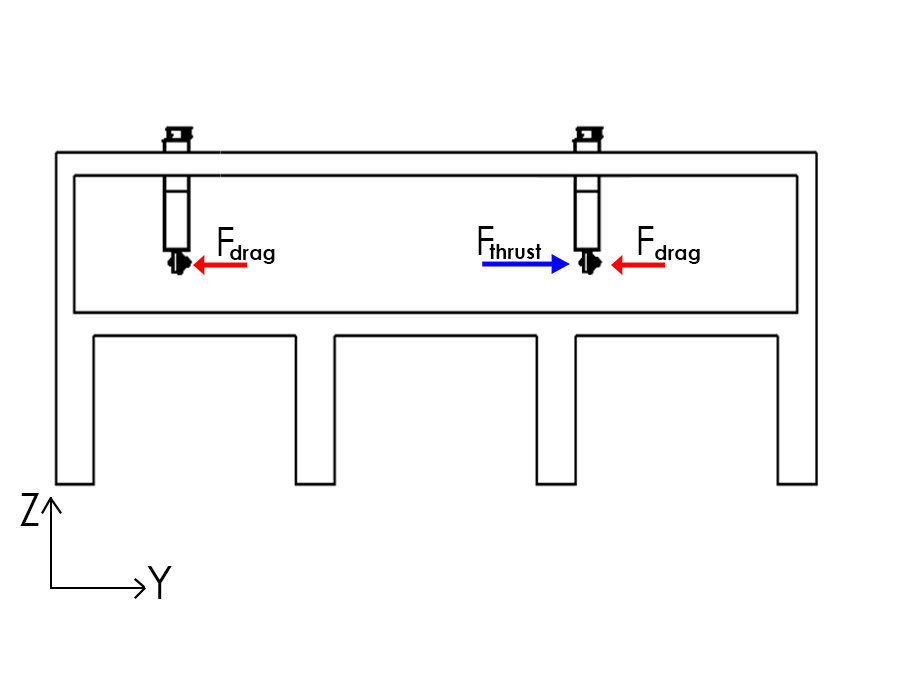
Mechanical Setup
The thruster was connected the load cell with a strut. I did some initial test to ensure that the strut did not affect the data collected. The drag from the force of the strut was taken into consideration, but I also needed to ensure that the vortex shedding induced was minimal and the tow tank was large enough for testing. To do this, I added dye into the tank and watched the water patterns. I found that matching the contours of the thruster mount minimized vortex shedding and the walls of the tank are sufficiently large such that it water intake over the propeller is unaffected.

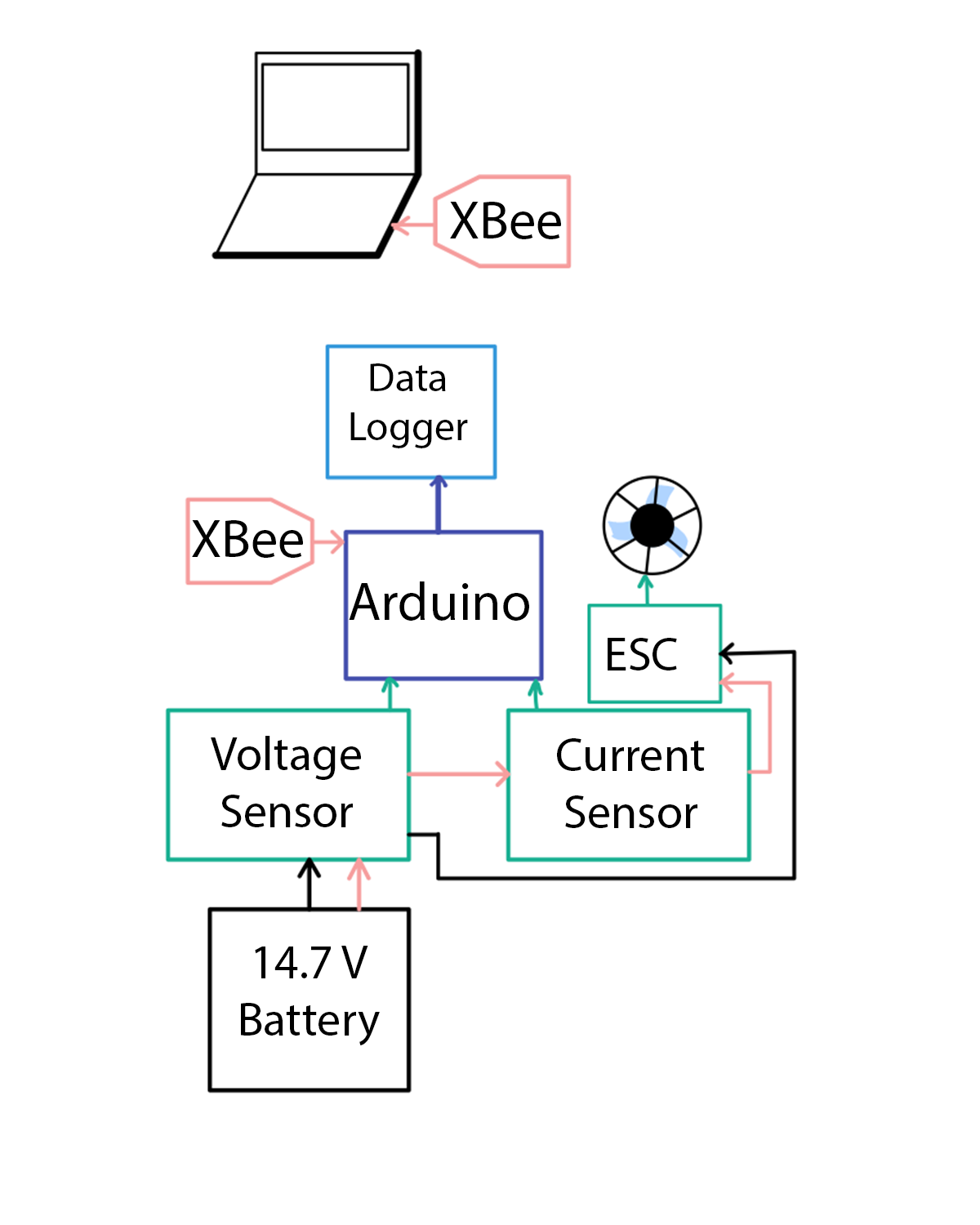
Electronics
The voltage and current sensor were connected to a data logger through an Arduino which stores the information about electrical power consumption for each run. The XBees wireless connects the Arduino to my computer allowing me to start and stop the thrusters and communicate the power consumption data to a Matlab file on my laptop. The electronics was placed in a waterproof box on top of the towing carriage.